产品中心
产品中心
软EtherCAT控制软件
CAS运动控制软件
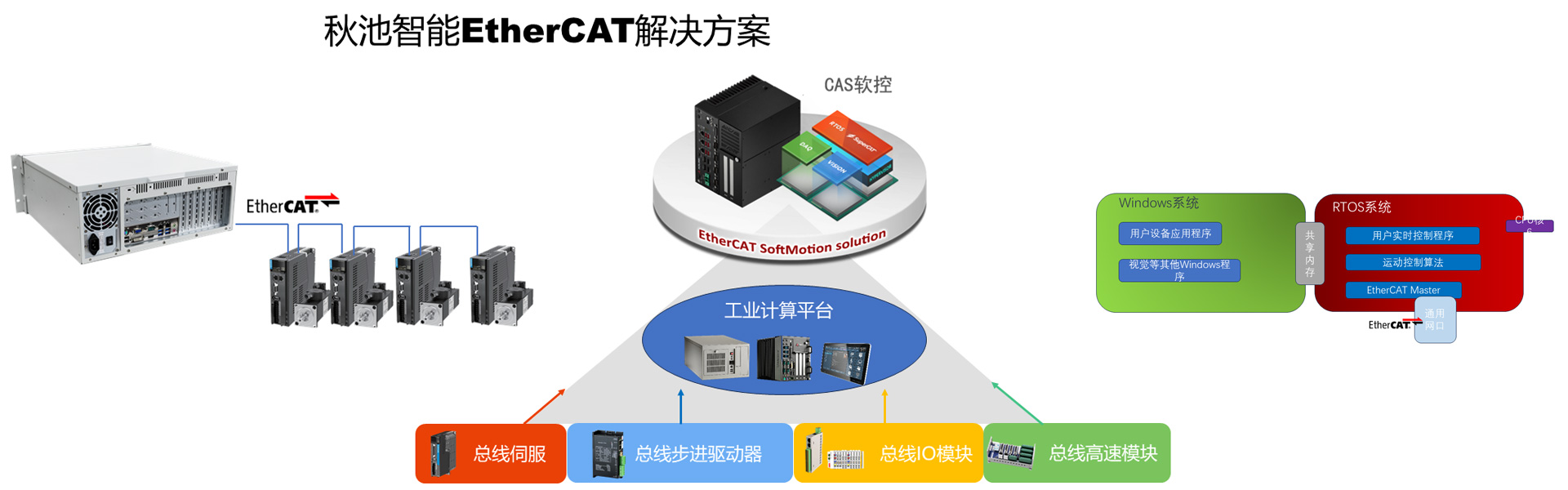
CAS运动控制软件 简介: 软件定义的 EtherCAT 运动控制,基于凌华SuperCAT底层开发,集合了凌华二十多年的运动控制算法, 一台工控机解决运动控制需求。
1、无需任何外接板卡,控制器等硬件,稳定性提高; 2、共用工控机CPU/内存,摆脱硬件算力限制; 3、实时核系统编程-更精确更快速的函数执行。 功能介绍: 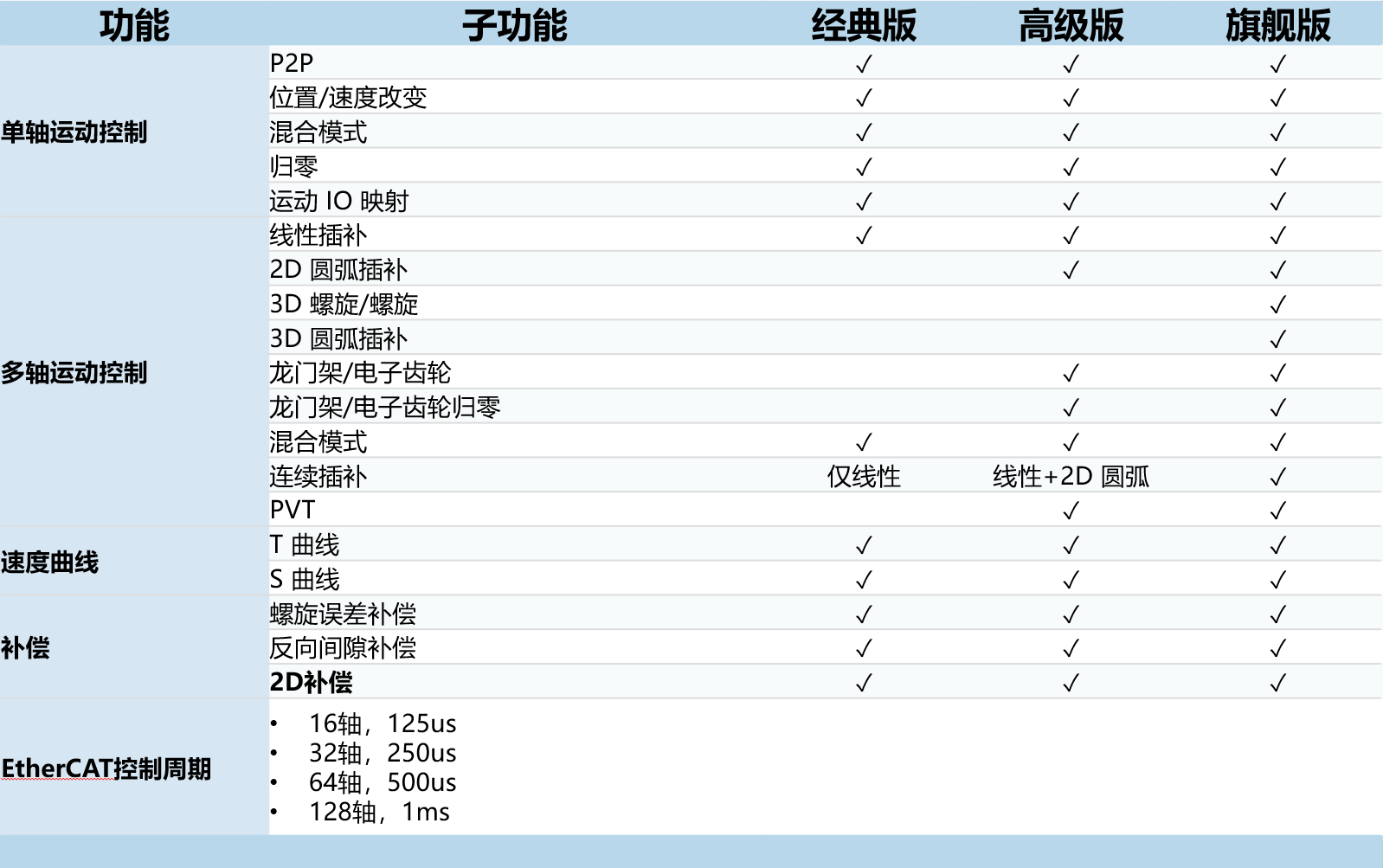 1、无需外接硬件的软控架构 不占用PCI/PCIE插槽、更灵活的工控机选择、避免硬件板卡故障率问题、避免硬件连接接触不良问题。 升级更新更方便快速、更快响应客户新功能需求,功能轴数组合更灵活,一套软件满足各种应用场景。 2、摆脱专用芯片束缚,运动控制算力大变革 软控直接使用工控机的CPU算力和内存,不再受限于板卡的算力和内存资源。
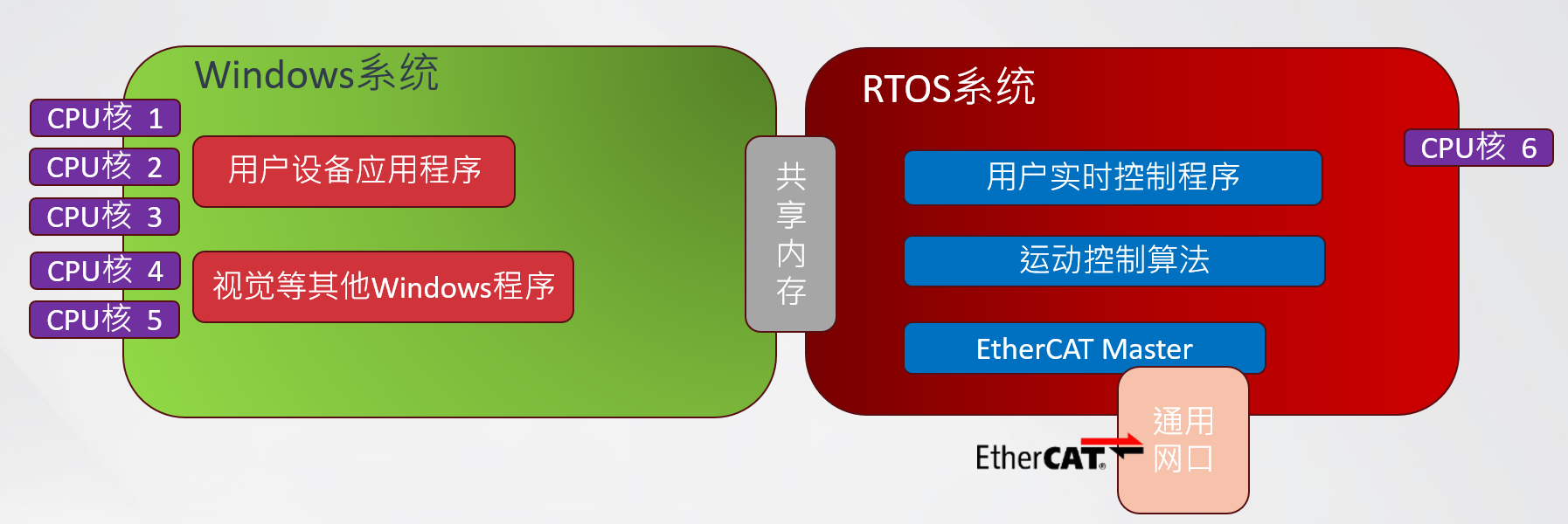
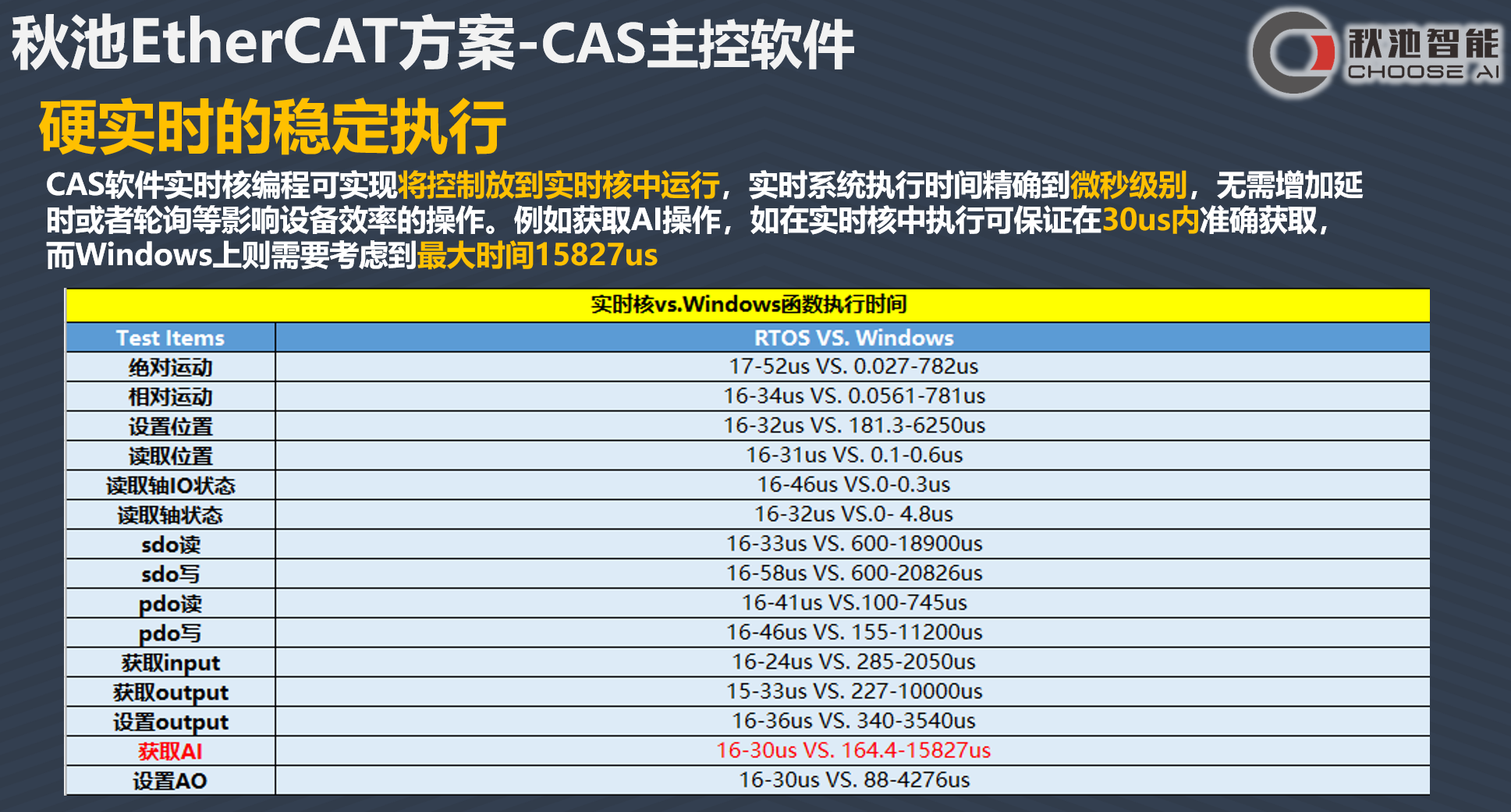
更多轴数的控制-128轴 更快的控制周期-16轴 125us 支持更多组点表功能 更短的函数响应时间 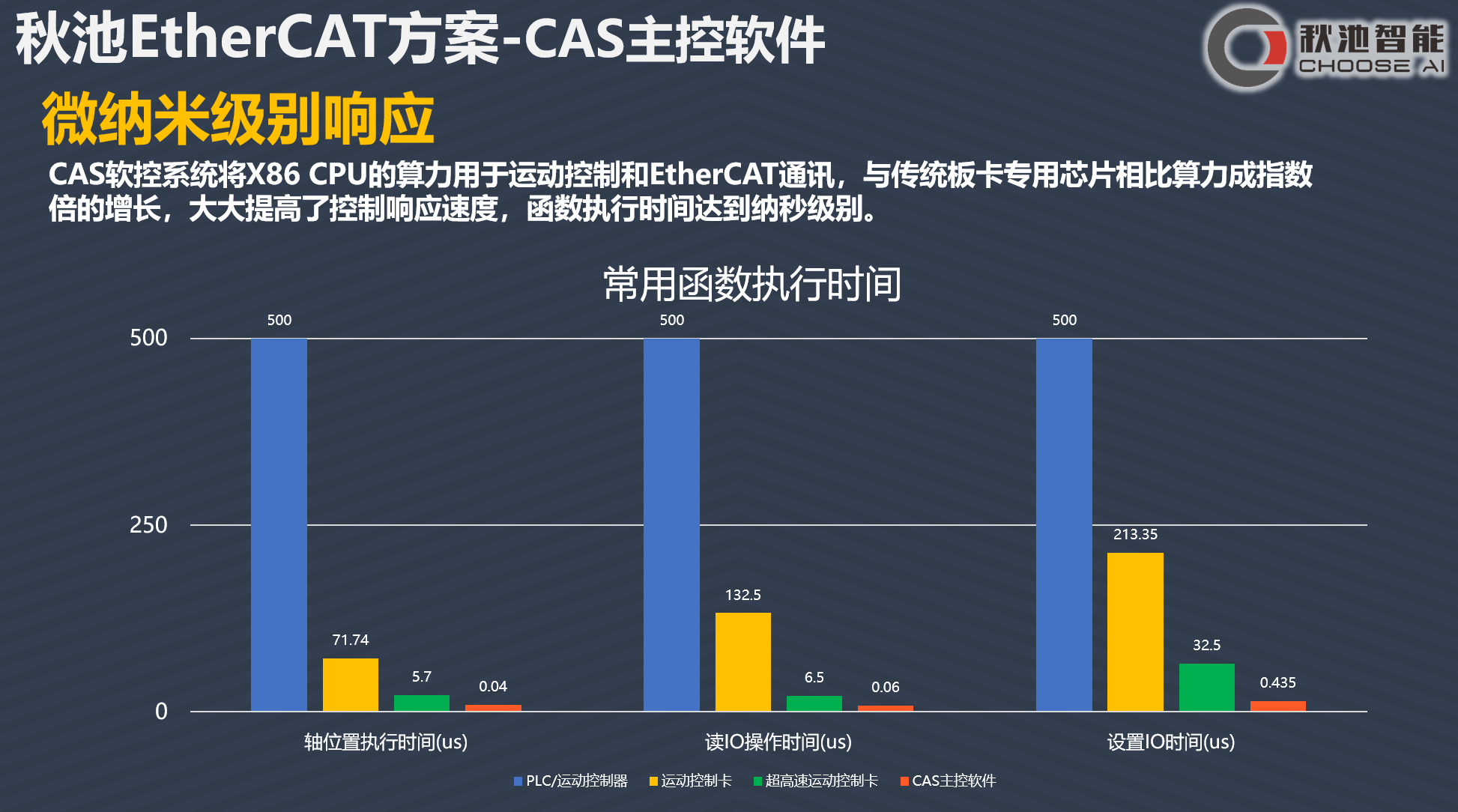 3、实时核编程-硬实时的精确执行 CAS软件实时核编程可让客户将高速高精的控制下放到实时核中运行,执行时间精确到微秒级别, 无需增加延时或者轮询等影响设备效率的操作。 例如对模拟量的操作,如在实时核可保证在40us内准确获取,而Windows上则需要考虑到最大时间15827us。
|