

秋池CAS运动控制软件在固晶机上的应用

共晶固晶机,将不同的封装材料与半导体芯片接触加热;形成共晶点并冷却凝固而实现连接的封装设备,适用于SOT,SOD等半导体分立器件的封装。
整机采用高规定制直线电机驱动;独立控制的裁切方式,具有高速高精和高稳定性的特点。
该设备有14个轴需要协调控制,体积设计紧凑,原有的脉冲控制方案接线布线复杂,在有限的空间里很容易出现干扰等问题,因此越来越多的客户开始考虑EtherCAT总线控制方案。
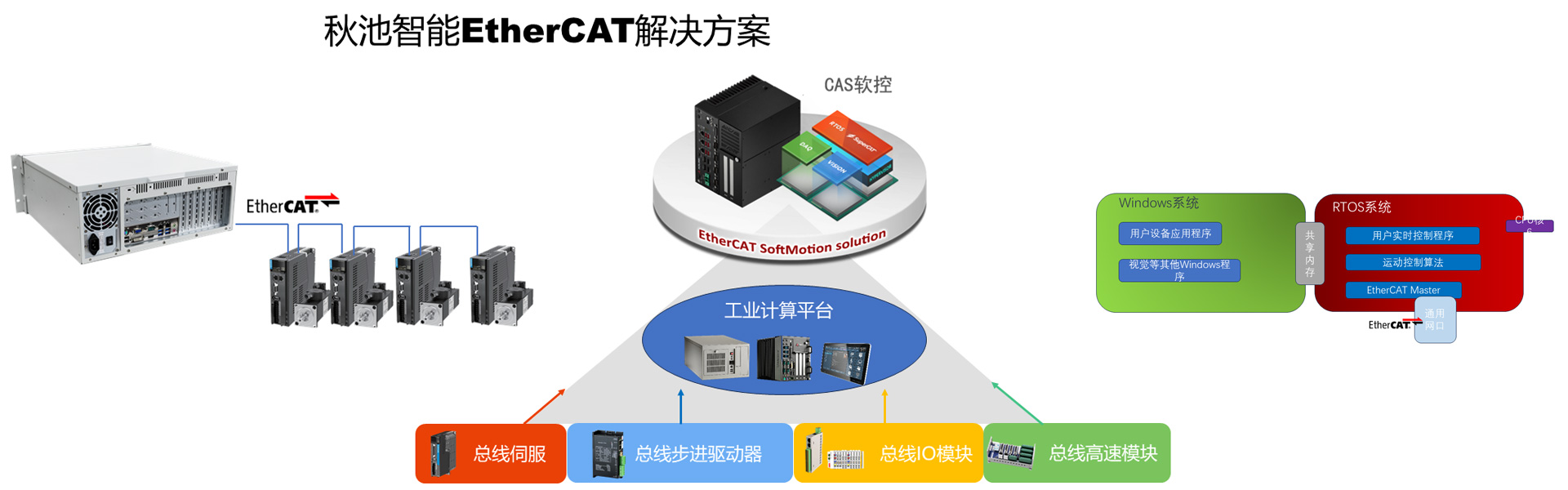
CAS运动控制软件产品概述:
CAS运动控制软件是秋池智能打造的基于软件控制的EtherCAT运动控制器,其核心的控制软件来自于凌华二十多年运动控制经验的积累,整合了凌华脉冲卡和EtherCAT总线卡的运动控制算法,系统通讯周期相比硬件的EtherCAT总线卡得到了大幅提升,同时可以满足更多轴数的应用需求。
CAS运动控制软件产品特性:
• 具备EtherCAT主站功能
• 运动控制周期高达125us
• 最多支持128轴运动控制
• 最低 API 延迟<10us
• APS SDK 支援
• MotionCreatorPro2 支援
• 支持开发语法 C#, .NET, C/C++, Python, Java…etc
• 支援多任务与实时程序运行
与板卡相比的三大优势:
1、软件架构,无需硬件,一台工控机解决设备控制需求
CAS运动控制软件是软件定义的EtherCAT总线运动控制方案,与传统板卡相比不占用PCI/PCIE插槽、客户可以有更灵活的工控机选择、同时避免硬件板卡故障率问题、避免硬件连接接触不良问题,并且因为不受硬件资源接口等限制,升级更新更方便快速、能更快响应客户新功能需求,功能轴数组合更灵活,实现一套软件满足各种应用场景
2、摆脱专用芯片限制,运动控制算力大变革
相比传统板卡使用DSP等专用芯片,CAS运动控制软件直接使用工控机的CPU和内存进行运算,根据实际控制需求选择工控机配置,不需要再受限于硬件的算力,相比于传统板卡,CAS软件可以做到:
• 更多轴数的控制-128轴
• 更快的控制周期-16轴 125us
• 支持更多组点表功能
• 更短的函数响应时间
3、实时核编程-硬实时的精确执行
CAS软件是由Windows系统和RTOS实时系统通过Hypervisor技术同时运行在一台工控机上来实现的实时运动控制方案,RTOS是我司与凌华自主开发的实时系统,因此我们可以向客户开放实时系统的编程环境,让客户将一部分要求高速高精的控制算法放到实时核中运行,相比于在非实时的Windows系统上运行,实时核的执行时间更准确,能大幅度提升客户设备的执行效率。
固晶机的功能需求:
1)、高速高精的控制;
2)、高稳定性运行。
CAS软件解决方案:
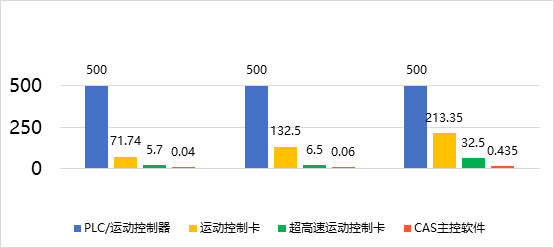
1)、CAS软件直接使用工控机的CPU和内存计算,函数执行效率,响应速度大大提高,从而大幅度提升设备的UPH值,实际应用中固晶机空跑UPH可达20.2K,带料运行UPH为18K。
实测对比CAS软件和传统板卡的函数执行时间如图所示:
2)、纯软件架构
无板卡等硬件,无需占用PCI/PCIE插槽,避免了硬件故障问题以及硬件连接中可能出现的接触不良等问题,EtherCAT总线的通讯方案,伺服IO等接线更加简洁方便,接线错误问题大大减少,通讯更加稳定,设备整体稳定性大幅度提高。
